介绍
Dora是运行实时多AI和多硬件应用程序的支持多语言的框架。
Dora by Examples是一系列可运行的示例,旨在帮助用户快速入门和学习如何使用Dora框架。这些示例涵盖了各种应用场景,包括各类传感器使用,图像分类、目标检测、语音识别,电机控制等。包括Python、Rust、C++等语言的示例。
目录
安装
Dora 提供了多种安装方式
pip install dora-rs-cli
curl --proto '=https' --tlsv1.2 -LsSf https://github.com/dora-rs/dora/releases/latest/download/dora-cli-installer.sh | sh
curl --proto '=https' --tlsv1.2 -LsSf https://github.com/dora-rs/dora/releases/latest/download/dora-cli-installer.sh | sh
powershell -ExecutionPolicy ByPass -c "irm https://github.com/dora-rs/dorareleases/latest/download/dora-cli-installer.ps1 | iex"
cargo install dora-cli
docker pull ghcr.io/dora-rs/dora-slim #拉取镜像
docker run ghcr.io/dora-rs/dora-slim dora --help #运行容器
git clone https://github.com/dora-rs/dora.git
cd dora
cargo build --release -p dora-cli
PATH=$PATH:$(pwd)/target/release
important
本文主要围绕主分支的最新代码展开,如果想获得完全相同体验请尽量使用主分支上的Dora。 所有的样例以及部分多编程语言涉及到的特定包(Rust Crates)只在源码中给出,现阶段推荐从源码安装
确认完成安装
$ dora --version
dora-cli 0.3.11
从源码安装dora(以Ubuntu24.04为例)
安装Rust
安装rustup,rustup是管理Rust版本、编译工具链的重要工具
$ sudo apt install curl -y # 安装curl,如果未安装
$ curl --proto '=https' --tlsv1.2 -sSf https://sh.rustup.rs | sh # 弹出选项,回车选择默认安装即可
$ export PATH=$PATH:$HOME/.cargo/bin # 设置环境变量
获取Dora源代码
$ sudo apt install git -y # 安装git,如果未安装
$ git clone https://github.com/dora-rs/dora.git
$ cd dora
编译Dora-CLI
Dora-CLI是非常实用的命令行工具,它提供了许多方便的命令来管理Dora项目。
$ sudo apt install build-essential -y # 安装C/C++编译环境相关的包(包括g++等),如果未安装
$ cargo build --release --package dora-cli
添加到环境变量
$ export PATH=$PATH:$(pwd)/target/release # 添加到环境变量
或者可以选择官方提供的脚本
$ ./install.sh
基础
在本章节中,我们将介绍一些基础概念和工具,帮助您开始使用Dora。
echo
路径: ./examples/echo
关键词:Node, Dataflow
Dora中,一个逻辑功能通常作为节点(Node)。不同逻辑功能的交互依赖于信息的交互(Dataflow)。为了方便不同节点之间的组合,Dora使用yaml文件来声明消息的“流动”。
yaml不仅声明了不同节点消息的输入、输出,还可以声明节点构建(编译、安装)的过程。在使用这些节点之前需要先进行构建。
构建
tip
如果使用uv管理的python可在命令中加入--uv参数
进入examples/echo文件夹,执行命令
$ dora build dataflow.yaml # --uv
输出:
Using Python 3.11.12 environment at: ...
Resolved 4 packages in 1.20s
Built pyarrow-sender @ ...
Prepared 1 package in 693ms
Installed 1 package in 1ms
~ pyarrow-sender==0.3.11 (...)
Using Python 3.11.12 environment at: ...
Resolved 4 packages in 4ms
Built dora-echo @ ...
Prepared 1 package in 507ms
Installed 1 package in 1ms
+ dora-echo==0.3.11 (...)
Using Python 3.11.12 environment at: ...
Resolved 4 packages in 3ms
Built pyarrow-assert @ ...
Prepared 1 package in 499ms
Installed 1 package in 1ms
~ pyarrow-assert==0.3.11 (...)
运行
依据yaml文件运行Dora框架:
$ dora run dataflow.yaml # --uv
输出:
... INFO run_inner: dora_daemon::log: pyarrow-assert finished successfully...
各节点的作用
node-hub提供了很多现成的方便复用的节点
Dora中通过环境变量为节点提供参数
pyarrow-sender节点:生成了内容为DATA的信息dora-echo节点:将输入的内容发送出去pyarrow-assert节点:判断接收消息与DATA是否一致
额外的尝试
更改pyarrow-sender或pyarrow-assert的DATA参数,在二者不一致时运行会产生报错
输出:
... [ERROR]
Dataflow failed:
Node `pyarrow-assert` failed: exited with code 1 with stderr output: ...
多守护进程(Daemon)
地址:examples/multiple-daemons 关键词:Daemon, Coordinator
Dora通过Coordinator来协调多个Daemon的运行。Daemon可以来自不同的机器。这是Dora分布式的基础。
启动准备
启动一个协调器(Coordinator)
$ dora coordinator
其运行ip与端口的绑定设置,可通过添加--help参数来查看,样例中用默认的设置即可。
启动守护进程(Daemon)
$ dora daemon --machine-id A
$ dora daemon --machine-id B
分别启动两个分别名为A和B的守护进程。
可以通过--coordinator-addr和--coordinator-port来指定协调器的地址和端口。
具体可以参考dora daemon --help。
构建
$ dora build dataflow.yml
可以通过--coordinator-addr和--coordinator-port来指定协调器的地址和端口。
具体可以参考dora build --help。
运行
$ dora start dataflow.yml
可以通过--coordinator-addr和--coordinator-port来指定协调器的地址和端口。
具体可以参考dora start --help。
构建与加载
关键词:build, launch
Dora-cli 中常用的命令
Dora命令行工具提供了build和start等命令。
coordinator启动一个coordinator进程,用于调度协调。daemon在本地启动一个daemon进程,用于运行dataflow,可以指定连接到任一coordinator。start启动一份dataflow,可以指定连接到任一coordinator。run相当于在本地自行创建一个coordinator、daemon并在其上加载对应的dataflow.yml。- ...
YAML配置文件
Dora通过使用YAML配置文件来描述dataflow。 形如:
nodes:
- id: rust-node
_unstable_deploy:
machine: A
build: cargo build --release -p rust-dataflow-example-node
path: $DORA_EXAMPLES/target/release/rust-dataflow-example-node
inputs:
tick: dora/timer/millis/10
outputs:
- random
- id: rust-status-node
_unstable_deploy:
machine: A
build: cargo build --release -p rust-dataflow-example-status-node
path: $DORA_EXAMPLES/target/release/rust-dataflow-example-status-node
inputs:
tick: dora/timer/millis/100
random: rust-node/random
outputs:
- status
- id: rust-sink
_unstable_deploy:
machine: B
build: cargo build --release -p rust-dataflow-example-sink
path: $DORA_EXAMPLES/target/release/rust-dataflow-example-sink
inputs:
message: rust-status-node/status
通过环境变量更灵活的启动
在build和path字段中都可以使用环境变量,例如$DORA_EXAMPLES。
这使得节点的位置可以更加灵活的放置。
值得注意的是,这两个字段中的环境变量会使用daemon所处运行环境的环境变量。
构建字段的技巧
Dora的build字段参考了Github Action的设计,但是其功能并不完备。
build字段允许通过多行来声明需要多个命令的构建。
如果需要借助脚本或更复杂的参数时可以使用bash -c "..."
编程语言
Dora的核心部分及大部分功能虽然使用Rust编写,但是也为其它编程语言提供了可编程接口支持多种编程语言,包括Python、C++等。
在本节中将展示不同编程语言中Dora的使用。
C/C++
需要预先准备的包
为了实现C/C++多语言混合编程,需要准备好相关的包。 需要从源码安装Dora,并且构建相关包:
- 运行时
$ cargo build -p dora-runtime # --release
- 如果需要使用C API
$ cargo build -p dora-node-api-c # --release
$ cargo build -p dora-operator-api-c # --release
- 如果需要使用Rust API
$ cargo build -p dora-node-api-cxx # --release
$ cargo build -p dora-operator-api-cxx # --release
当使用启用release编译时,需注意将连接的地址target/debug替换为target/release
如果对Rust与C++的混合编译感兴趣,可以参阅cxx.rs
C++ 样例
数据流(Dataflow)
地址:./examples/c++-dataflow
关键词:C++, Node, Operator
Dora相关包的准备
需要预先准备的包 官方样例中使用clang++进行编译,实测g++也是可以使用的,对于大部分的Linux发行版(如Ubuntu等)使用默认安装的g++即可。
C API
构建
alias CXX='clang++' # CXX='g++'
mkdir build
# 构建算子
CXX -c operator-c-api/operator.cc -std=c++17 -o operator-c-api/operator.o -fPIC
CXX -shared operator-c-api/operator.o -ldora_operator_api_c -L../../target/debug/ -o ./build/liboperator_c_api.so
# 构建节点
CXX node-c-api/main.cc -lm -lrt -ldl -pthread -L../../target/debug -ldora_node_api_c -o ./build/node_c_api
#TBD#
#TBD#
Rust API
构建
alias CXX='clang++' # CXX='g++'
mkdir -p build
# 构建算子
cp ../../target/cxxbridge/dora-operator-api-cxx/src/lib.rs.h ./build/dora-operator-api.h
cp ../../target/cxxbridge/dora-operator-api-cxx/src/lib.rs.cc ./build/operator-bridge.cc
CXX -c ./operator-rust-api/operator.cc -std=c++17 -I./operator-rust-api -o operator-rust-api/operator.o -fPIC
CXX -c ./build/operator-bridge.cc -std=c++17 -I./operator-rust-api -o ./build/operator-bridge.o -fPIC
CXX -shared ./operator-rust-api/operator.o ./build/operator-bridge.o -ldora_operator_api_cxx -L../../target/debug/ -o ./build/liboperator_rust_api.so
# 构建节点
cp ../../target/cxxbridge/dora-node-api-cxx/src/lib.rs.h ./build/dora-node-api.h
cp ../../target/cxxbridge/dora-node-api-cxx/src/lib.rs.cc ./build/node-bridge.cc
CXX ./node-rust-api/main.cc ./build/node-bridge.cc -lm -lrt -ldl -pthread -L../../target/debug -ldora_node_api_cxx -o ./build/node_rust_api
#TBD#
#TBD#
运行
$ dora run dataflow.yaml
相关节点功能概览
node-c-api:使用C API对接收到的数据进行计数,并返回计数node-rust-api: 使用Rust API对接收到的数据进行计数,并返回计数operator-c-api:使用C API接受数据并除以2后发出operator-rust-api:使用Rust API对接收到的所有消息进行计数,并将收到的消息发出
数据流(Arrow Dataflow)
地址:./examples/c++-arrow-dataflow
关键词:Arrow,Dataflow
Apache Arrow 是通用的、列式格式的、快速数据交换和内存中分析工具。支持多种语言。
安装Arrow
更详细的安装说明与选项请参考Arrow官方安装文档。
$ sudo apt update
$ sudo apt install -y -V ca-certificates lsb-release wget
$ wget https://packages.apache.org/artifactory/arrow/$(lsb_release --id --short | tr 'A-Z' 'a-z')/apache-arrow-apt-source-latest-$(lsb_release --codename --short).deb
$ sudo apt install -y -V ./apache-arrow-apt-source-latest-$(lsb_release --codename --short).deb
$ sudo apt update
$ sudo apt install -y -V libarrow-dev # For C++
构建
通过pkg-config --libs arrow和pkg-config --cflags arrow获得系统安装的Arrow库相关的编译设置
$ mkdir build
$ cp ../../target/cxxbridge/dora-node-api-cxx/src/lib.rs.cc ./build/node-bridge.cc
$ cp ../../target/cxxbridge/dora-node-api-cxx/src/lib.rs.h ./build/dora-node-api.h
$ alias CXX=g++
$ CXX ./build/node-bridge.cc ./node-rust-api/main.cc -std=c++17 -lm -lrt -ldl -pthread -ldora_node_api_cxx -L../../target/debug/ $(pkg-config --libs arrow) $(pkg-config --cflags arrow) -o ./build/node_rust_api
运行
dora run dataflow.yml
C数据流
地址:./examples/c-dataflow
关键词:Dataflow, C
构建C API相关包
$ cargo build -p dora-node-api-c
$ cargo build -p dora-operator-api-c
Node
Source
$ alias C=gcc # 用clang亦可以
$ C node.c -lm -lrt -ldl -pthread -ldora_node_api_c -L../../target/debug/ -o ./build/c_node
Sink
$ C sink.c -lm -lrt -ldl -pthread -ldora_node_api_c -L../../target/debug/ -o ./build/c_sink
Operator
$ C -c operator.c -o build/operator.o -fPIC # 编译
$ C -shared build/operator.o -L../../target/debug/ -ldora_operator_api_c -o ./build/liboperator.so
CMake数据流
地址:./examples/cmake-dataflow
关键词:CMake, Dataflow
CMake是一个跨平台的构建系统,它允许开发者使用简单的脚本来描述项目的依赖关系和构建规则,从而实现跨平台的构建。C/C++ Dora项目也可以使用CMake来构建。
构建
$ cmake -DDORA_ROOT_DIR=../../ -B./build . # 通过DORA_ROOT_DIR变量指定Dora项目的根目录
$ cmake --build ./build
$ cmake --install ./build
运行
$ dora run dataflow.yml
ROS2数据流
地址:./examples/c++-ros2-dataflow
关键词:ROS2
确保ROS2环境已正确安装和配置
Dora通过ros2-client与ROS进行交互 C++ API为了与ROS通信,需要启用ROS2桥接功能。
准备相关依赖
由于例子与turtlesim和AddTwoInts相关
$ sudo apt install ros-jazzy-turtlesim ros-jazzy-examples-rclcpp-minimal-service
$ source /opt/ros/jazzy/setup.bash
$ cargo build --package dora-node-api-cxx --features ros2-bridge
$ mkdir build
$ cp ../../target/cxxbridge/dora-node-api-cxx/dora-node-api.cc ./build/dora-node-api.cc
$ cp ../../target/cxxbridge/dora-node-api-cxx/dora-node-api.h ./build/dora-node-api.h
$ cp ../../target/cxxbridge/dora-node-api-cxx/dora-ros2-bindings.cc ./build/dora-ros2-bindings.cc
$ cp ../../target/cxxbridge/dora-node-api-cxx/dora-ros2-bindings.h ./build/dora-ros2-bindings.h
当ROS2中的包出现变化时,需要重新构建dora-node-api-cxx从而确保dora-ros2-bindings的正确性。
在构建前务必先source需要使用的ROS环境,以确保各ROS包能被检测到并生成桥接文件
编译
$ alias CXX=g++ # clang++ 也可以
$ CXX ./node-rust-api/main.cc ./build/dora-ros2-bindings.cc ./build/dora-node-api.cc -std=c++17 -lm -lrt -ldl -lz -pthread -ldora_node_api_cxx -L ../../target/debug/ -o ./build/node_rust_api
运行
打开另外两个终端
需要使用rmw_fastrtps_cppJazzy 中应该是默认的,如果在.bashrc等地方设置成了别的注意要设置回来。
更改设置后重启daemon,ros2 daemon stop, ros2 daemon start
启动turtlesim
$ source /opt/ros/jazzy/setup.bash
$ ros2 run turtlesim turtlesim_node
启动AddTwoInts服务
$ source /opt/ros/jazzy/setup.bash
$ ros2 run examples_rclcpp_minimal_service service_main
启动Dora节点
$ dora run dataflow.yml
CUDA基准测试
Python
为了更方便的管理Python包,Dora推荐使用uv进行管理
安装UV
$ sudo apt install curl # 安装curl,如果未安装
$ curl -LsSf https://astral.sh/uv/install.sh | sh
Python 样例
数据流(Dataflow)
地址:examples/python-dataflow
关键词:Python, Dataflow
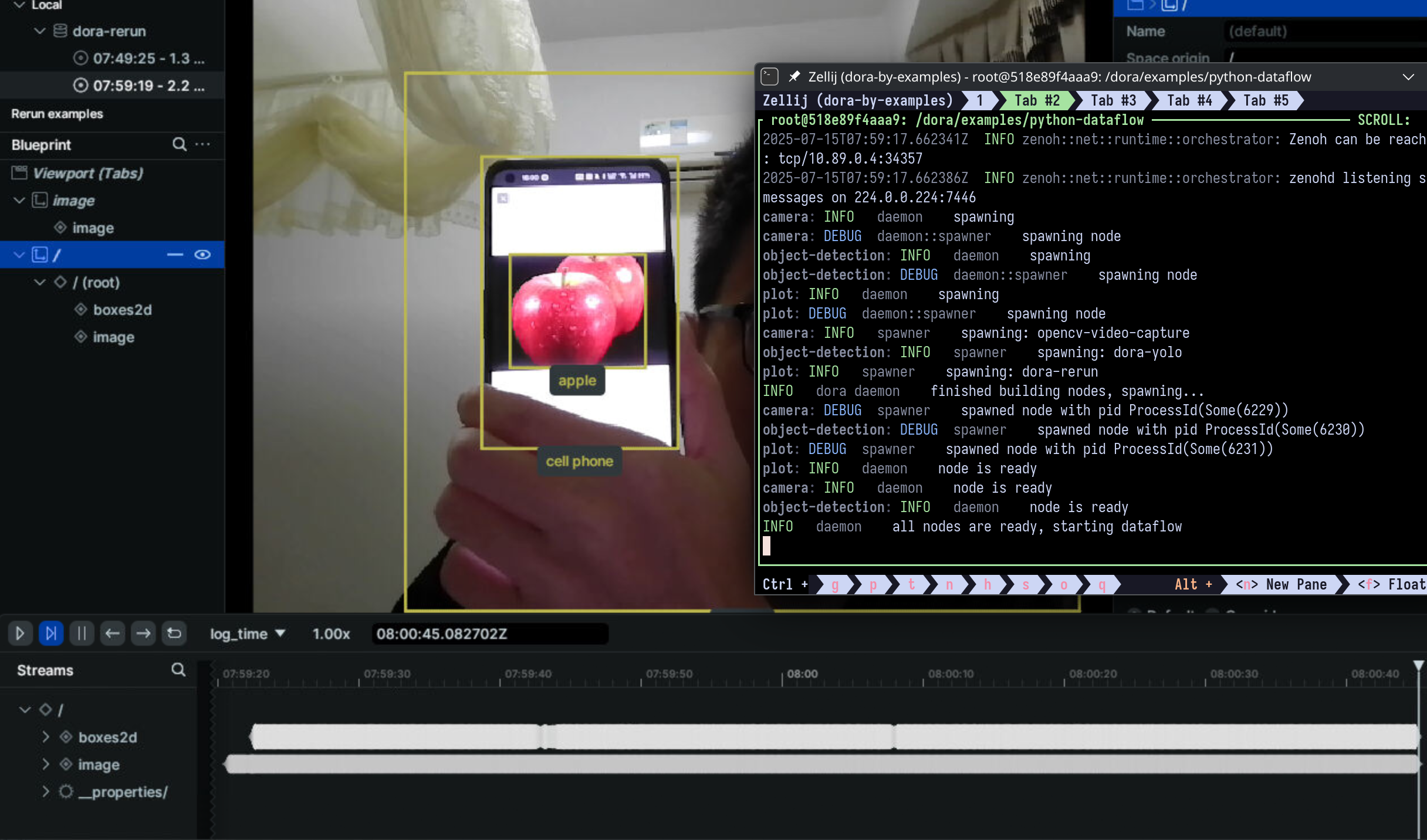
官方的Node Hub文件夹中提供了许多现成的节点 本例中用到的有
opencv-video-capture用于读取摄像头dora-yolo用于进行目标检测dora-rerun用于进行可视化
dataflow.yml除了用于描述输入输出外,还可以通过build字段进行简单的构建或安装
准备Python环境
$ uv venv -p 3.10 --seed
安装对应的包
当在dora build时加上--uv标签,会自动在使用pip前添加uv以使用uv管理的Python版本
$ dora build dataflow.yml --uv
运行
$ dora run dataflow.yml --uv
默认的视图中可能只包含照片项,在弹出的rerun窗口中右键时间轴上的/项,点击添加到新的视图中
动态节点
$ dora build dataflow_dynamic.yml --uv # 安装所需要的节点
$ dora up # 启动本地的 daemon 和 coordinator
$ dora start dataflow_dynamic.yml --uv
在另外一个中端窗口运行
$ uv run opencv-plot --name plot
算子(Operator)
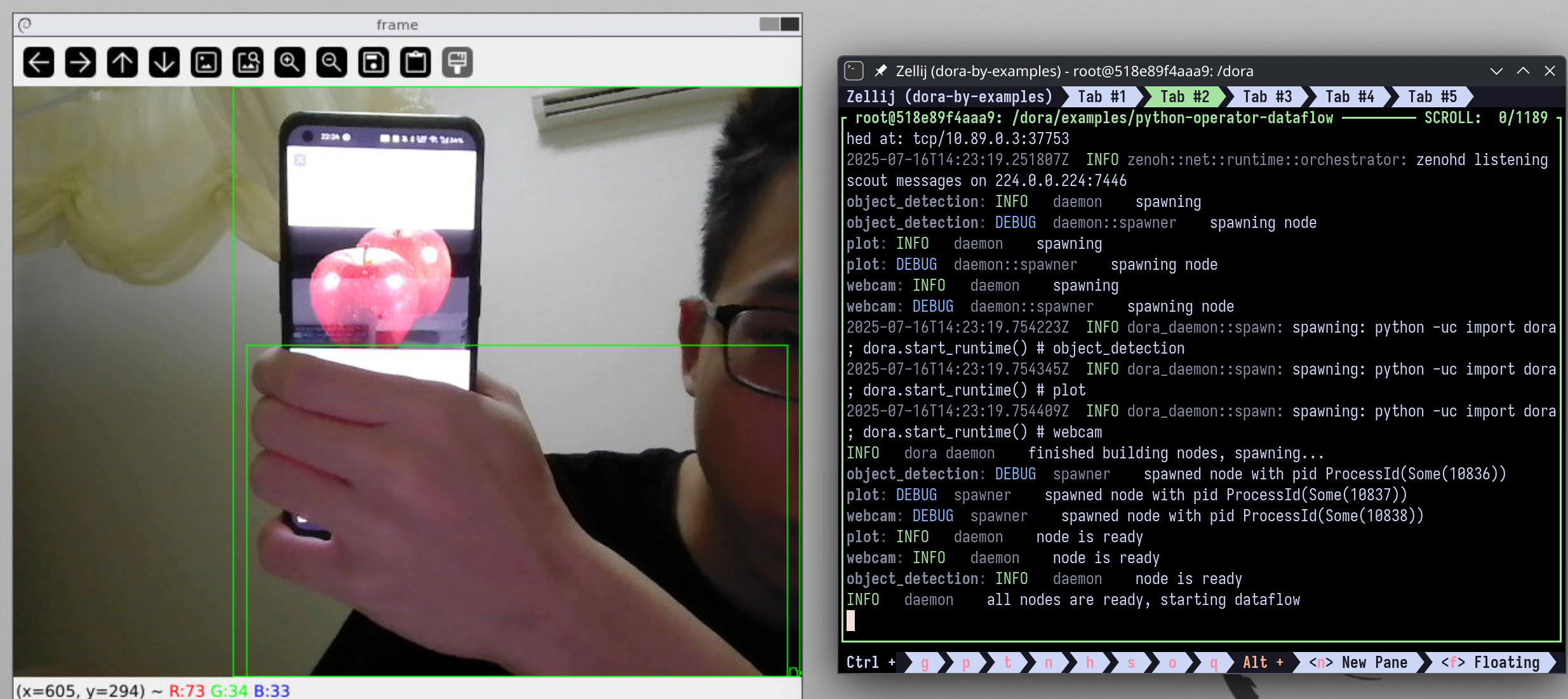
地址:examples/python-operator-dataflow
关键词:Operator
Operator提供了更加轻量化的方案,并且有更多Dora的高级功能,拥有更快的通信速度。
安装依赖
$ uv venv -p 3.11 --seed # 创建环境
$ uv pip install -e ../../apis/python/node # 安装Dora Python API
$ source .venv/bin/activate
$ pip install -r requirements.txt # 安装依赖,如果要体验dataflow_llm,则使用requirements_llm.txt
由于Operator暂未适配--uv标签作为启动参数,为了使用uv管理的Python,所以要在终端中source .venv/bin/activate
$ dora run dataflow.yml
异步
地址:examples/python-async
关键词:异步
$ uv venv -p 3.11 --seed # 创建环境
$ uv pip install -e ../../apis/python/node # 安装Dora Python API
$ dora build dataflow.yml --uv # 安装依赖
运行
$ dora run dataflow.yml --uv
本例较为简单展示了使用Python通过异步方式进行消息IO。
receive_data.py异步接收数据send_data.py发送数据
多Python环境共存
地址:examples/python-multi-env
关键词:多环境
uv通过VIRTUAL_ENV环境变量可以切换不同的Python的环境,则只需要在dataflow.yml中配置即可
构建环境
$ uv venv -p 3.11 -n env_1
$ uv venv -p 3.11 -n env_2
$ dora build dataflow.yml --uv
运行
$ dora run dataflow.yml --uv
运行效果应与python-dataflow一致。
ROS2数据流
准备相关依赖
由于例子与turtlesim和AddTwoInts相关
$ sudo apt install ros-jazzy-turtlesim ros-jazzy-examples-rclcpp-minimal-service
准备Python环境
$ uv venv -p 3.10 --seed
$ uv pip install -e ../../apis/node
启动
启动turtlesim
$ source /opt/ros/jazzy/setup.bash
$ ros2 run turtlesim turtlesim_node
启动AddTwoInts服务
$ source /opt/ros/jazzy/setup.bash
$ ros2 run examples_rclcpp_minimal_service service_main
$ source /opt/ros/jazzy/setup.bash
$ dora run dataflow.yml --uv
Rust
Rust 样例
Rust数据流(Dataflow)
地址:./examples/rust-dataflow
关键词:Rust,Dataflow
构建节点
$ dora build dataflow.yml
运行
$ dora run dataflow.yml
动态节点
Dora允许节点不一定有dataflow.yml启动,只需要预先将其path声明为dynamic即可。
构建
$ dora build dataflow_dynamic.yml
运行
- 启动dataflow.yml
$ dora up
$ dora start dataflow_dynamic.yml
- 在另一个终端启动动态节点
$ ../../target/debug/rust-dataflow-example-sink-dynamic
实现区别
通过工具查看动态节点与普通节点的区别

本地通信方式
Dora提供TCP、共享内存、Socket三种本地的节点通信方式。 在dataflow.yml中可以显示指定使用何种通信方式。
这是dataflow_socket.yml给出的
communication:
_unstable_local: UnixDomain
$ dora build dataflow_socket.yml
$ dora run dataflow_socket.yml
Rust网址数据流
地址:examples/rust-dataflow-url
关键词:url
warning
由于Dora官方在发布新版本时已经不再包含rust-node的动态库文件,因此,此样例无法正确运行。
并非所有共享节点的作者都乐意通过git的形式进行共享, 于是Dora提供了另外一种更为通用的方式,即通过HTTP协议进行数据流传输。 这种方式还为二进制分发提供了便利。
$ dora build dataflow.yml
$ dora run dataflow.yml
通过git获取节点
地址:examples/rust-dataflow-git
关键词:git
对于有的第三方节点,通常不会在意其实现细节,只需要关注其功能和接口即可。 利用git可以轻松对这些第三方的节点进行版本管理,确保代码的稳定性和可维护性。
$ dora build dataflow.yml
$ dora run dataflow.yml
Rust ROS2数据流
地址:./examples/rust-ros2-dataflow
关键词:ROS2,Rust
准备相关依赖
由于例子与turtlesim和AddTwoInts相关
$ sudo apt install ros-jazzy-turtlesim ros-jazzy-examples-rclcpp-minimal-service
构建
$ source /opt/ros/jazzy/setup.bash # 需要先应用ros2相关环境,在构建时才能找到相应ros消息类型
$ dora build dataflow.yml
启动
启动turtlesim
$ source /opt/ros/jazzy/setup.bash
$ ros2 run turtlesim turtlesim_node
启动AddTwoInts服务
$ source /opt/ros/jazzy/setup.bash
$ ros2 run examples_rclcpp_minimal_service service_main
$ source /opt/ros/jazzy/setup.bash
$ dora run dataflow.yml
进阶
Dora 官方提供了很多开箱即用的Node-hub, 其中包括但不限于:
可视化
使用相机
av1编码
深度相机
深度图像处理
物体识别
大语言模型
OpenAI
语音到语音
语音到文字
地址:./examples/speech-to-text/ 关键词:AI,语音识别
$ dora build whisper.yaml --uv
$ dora run whisper.yaml --uv
该样例默认使用openai/whisper-large-v3-turbo模型,
如果你想使用其他模型,可以通过为dora-whisper节点添加MODEL_NAME_OR_PATH环境变量来更改所使用的模型。
国内用户如果收到网络影响可以使用hf-mirror镜像来加速模型参数的拉取。 例如可以直接执行
HF_ENDPOINT=https://hf-mirror.com dora build whisper.yaml --uv
追踪
翻译
视觉语言模型
场景应用
alexk-lcr
aloha
reachy
reachy1
reachy2
reachy2远程
lebai
so100
远程
franka
PiPer
其他样例
基准测试
Python Arrow测试
附录
词汇表
- 节点(Node)
- 算符(Operator)
- 协作器(Coordinator)
其具体关系请参阅Dora设计
ROS2安装
ROS2安装的详细文档,请以ROS2官方文档为准
locale # check for UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # verify settings
启用需要的仓库
sudo apt install software-properties-common
sudo add-apt-repository universe
sudo apt update && sudo apt install curl -y
export ROS_APT_SOURCE_VERSION=$(curl -s https://api.github.com/repos/ros-infrastructure/ros-apt-source/releases/latest | grep -F "tag_name" | awk -F\" '{print $4}')
curl -L -o /tmp/ros2-apt-source.deb "https://github.com/ros-infrastructure/ros-apt-source/releases/download/${ROS_APT_SOURCE_VERSION}/ros2-apt-source_${ROS_APT_SOURCE_VERSION}.$(. /etc/os-release && echo $VERSION_CODENAME)_all.deb" # If using Ubuntu derivates use $UBUNTU_CODENAME
sudo dpkg -i /tmp/ros2-apt-source.deb
安装相应包
sudo apt install ros-jazzy-desktop
# or sudo apt install ros-jazzy-desktop